TensorFlow Powered Vacuum Cleaner
Using neural network to clean the house
TensorFlow Powered Vacuum Cleaners
In: Robotics,AI, TensorFlow, Deep Learning, Neural NetworksFirst of all, i would like to thanks to Fortino Barajas and his company Maids by Trade I have been collaborating with on this project. You can read more about application of this project in real world on their Blog.
When we talk about deep learning we usually assume robust systems advanced enough to solve complex problems usually through classification and regression. The fun on this project is to explore potentials of real-time learning without prior training data through neural network. This experiments utilises Google’s TensorFlow technology to powers Robotic Vacuum Cleaner within supplying the sensory inputs in real time into neural network. The final goal is to train the system so it can perform efficient cleaning without prior knowledge of obstacles in the room or any other training data. What we need?
- Generic Robotic Vacuum Cleaner capable of being controlled via DIN serial interface.
- RaspberryPi device (In my scenario model 3B has been used).
- 5V Power Supply (Using USB battery pack should provide good autonomy)
- USB Camera. (2+ Megapixels for best results)
In this example we are connecting Vacuum cleaner serial port to Raspberry Pi via Din to to USB serial converter.
(I am not going to cover different models connectivity as they may varry but it should be fairly easy to find around the web how to connect)
I made compiled project including tensor-flow and Raspberian available on GitHub.
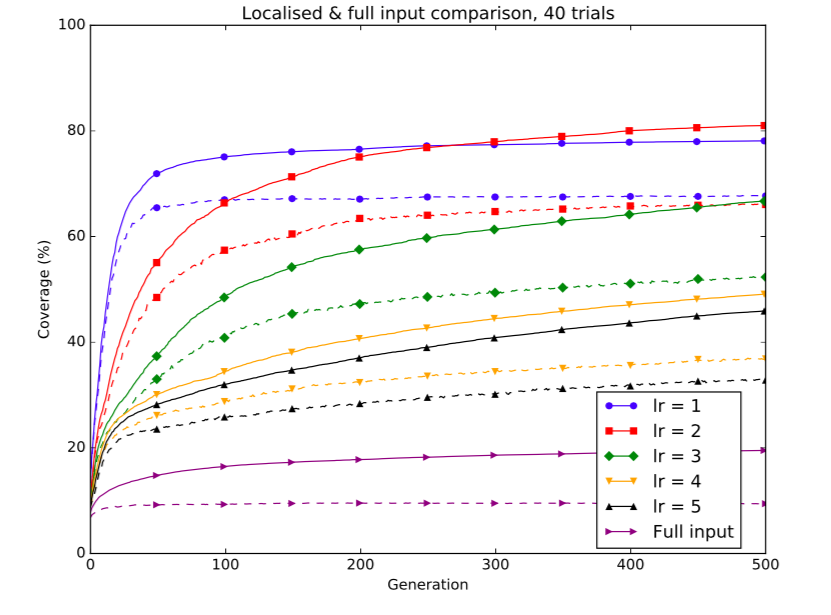
Results
Efficiency:
 Before:
Before:
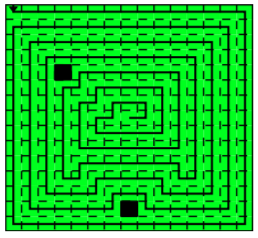
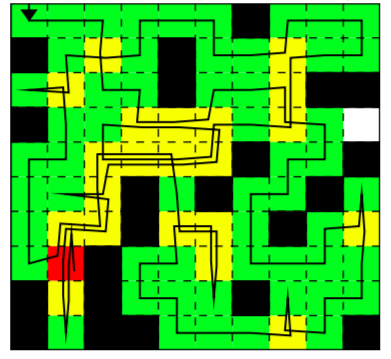 After:
After:
Join the talk
Share your toughts on the subject or whatever you would like to know.